Hornet is a hybrid drone with quadrotor and fixed-wing flight modes combined to give vertical take-off and landing (VToL) and efficient fixed-wing cruising at the same time. Hornet doesn’t need a runway or a skilled pilot. Hornet is one of our MPhil projects funded by the National Research Council. https://www.youtube.com/watch?v=cu8rdGvTDYY

Smart Junction is a vision based traffic control system being developed together with the Innovation Quotient Pvt. Ltd. In the first phase, vision and off-line learning methods are used for accurate sensing of incoming traffic.

Telepresence Robot is a mobile robot with audio video connectivity with a remote user. This was built to be kept at the work place for its employees to login from outside when they have to be present at the work place. Four final year project groups involved in building this robot for the company Pulztech. https://www.youtube.com/watch?v=jN0u6yvkPpc&feature=youtu.be

CeyTwin is a twin-puller drone specifically designed for precession aerial surveying. CeyTwin has proven 3.8cm georeferencing accuracy in the most recent mapping assignment. It has one hour endurance to map 5km2 (500ha) area in one flight. It can be hand-launched and landed by a parachute. CeyTwin is a product of our drone startup company. https://www.youtube.com/watch?v=ResHjAu3XPQ

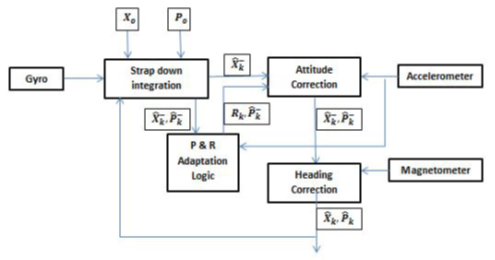
zeroMag IMU is a new inertial measurement sensor specifically developed for accurate attitude measurement in view of persistent magnetic field disturbances. zeroMag IMU is essential for aerial vehicles operating indoor or near buildings with iron structures. A few sensor fusion algorithms have been developed in this MPhil project. After the development, the sensor will be commercialized.
CeyBee is an ultralight multipurpose drone, which is able to fly nearly two hours. It can be fitted with mapping camera, multispectral camera, or a gimballed camera. CeyBee is hand launched and landed by a parachute. CeyBee is a product of our drone startup company.

Quad2 is a modular hierarchical quadrotor assembly to produce a higher lift by way of using many smaller propellers. Quad2 is fault-tolerant, and redundant. It gives lower I2R loss and EMI (electromagnetic interference). It also has a very low crash probability. Quad2 is a 2018 MPhil project funded by the Senate Research Committee.

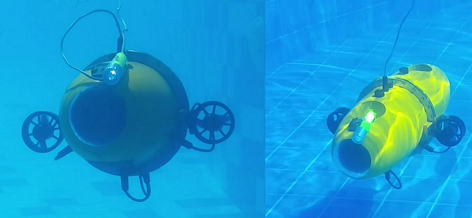
AUR (Autonomous Underwater Robot) is a small underwater robot designed for underwater research on localization, control, and navigation. AURobot is one of our final year projects.
https://www.youtube.com/watch?v=PhFk7-63TV8
Hawk is a 12kg 3hr long range unmanned aerial vehicle designed and built for large scale aerial mapping and surveillance operations. Hawk was developed at the University and handed over to our UAV startup company for commercialization,

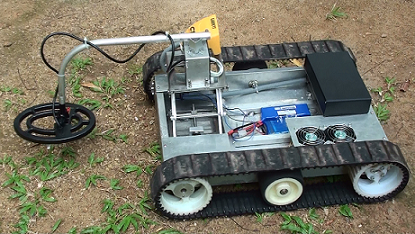
RC power-tiller is a remotely operable farming vehicle developed for elderly, disabled and women to operate from a convenient place away from hot Sun. This work, which is one of our MSc projects was supported by the NSF, Sri Lanka
https://www.youtube.com/watch?v=Sx9LSpMVNIk

RAVAN (Robotic Aerial Vehicle with Autonomous Navigation) is a twin-boom H-tail fixed wing. RAVAN was used quite extensively for research in UAV path planning, and it was one of our final year projects.

.
HexPack is a hexacopter for small package delivery. Propellers have been inverted to improve safety. A unique combination of guard ring and landing gear further improves safety. This drone can lift 3kg payload and fly about 20minutes.
https://www.youtube.com/watch?v=z2KcI8Fed78

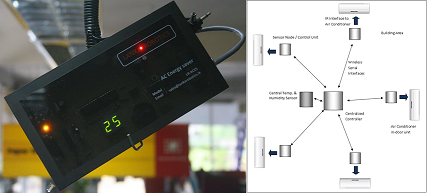
Elephant Fence is an electric fence designed to protect villages from elephants. The fence is remotely monitored for voltage and faults, and also operated through GSM network. Autonomous control is used using a real-time clock.
https://www.youtube.com/watch?v=Xow_iZ1opQY
DMD (Disaster management Drone) is a delta-wing drone developed for real-time aerial observation of disaster sites such as floods. Electric version was first developed, which is being converted to engine version to get 2hr endurance. It can easily lift 1kg payload. DMD takes off from a launcher fully autonomously, and landed using a parachute. DMD was funded by the UNDP

